We fine-tune a model to predict remaining steps from proof states. Our DeepSeek Coder 1.3B model achieves 75.8% accuracy with MAE of 3.15. When we use these predictions to guide search, we see a 3.8% improvement on Mathlib4 (from 41.4% to 45.2%).
Step Prediction
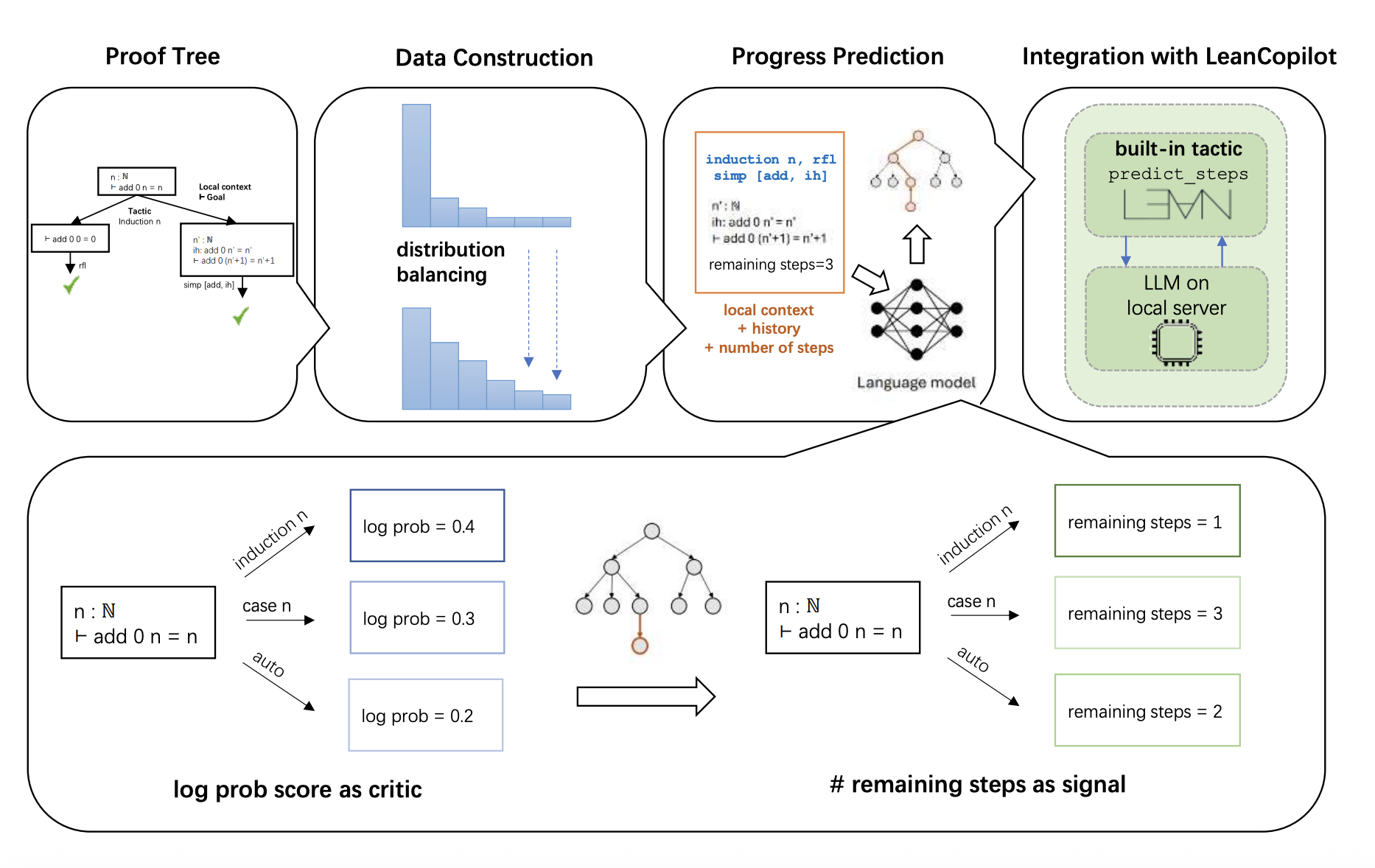
We fine-tune DeepSeek Coder 1.3B to predict the exact number of remaining steps from intermediate proof states. The model takes the current state and optional proof history as input.
Progress-Guided Search
We combine step predictions with tactic log probabilities in a best-first search. This helps prioritize paths that are likely to complete faster and avoid unproductive branches.
LeanCopilot Integration
We built predict_steps_with_suggestion into LeanCopilot. It shows tactic suggestions along with how many steps each one would leave, making it easier to choose tactics.